 SB 1
SB 1Wie
im Schaltbild zu sehen, werden von mir die im Rumpf
sich befindlichen Servos direkt mit der Versorgungsspannung verbunden
und dem
Empfänger anstatt eines Steckers somit mit 2 Steckern
zugeführt.
Außerdem kann man auch erkennen, dass damit nur die in den
Flächen sich
befindlichen Servos vom Empfänger aus mit der Spannung versorgt
werden.
Auch sind in der Fläche der jeweilige Plus und Minus der Spannung
miteinander
verbunden, sodass, sollte sich einmal bei einem Stecker der Plus oder
Minus
unterbrochen werden, wird immer noch die Versorgungsspannung, des in
diesem Fall, das sich betreffende Servo versorgt. Bei einer
Unterbrechung einer Impulsleitung allerdings besteht diese Sicherheit
nicht.
Auf jedem Fall besteht somit eine zweifach höhere Sicherheit
bei einer Unterbrechung.
Dann besteht noch ein wesentlicher Vorteil. Der Querschnitt der
Servoleitung wird z. T.
eine größere Strecke verstärkt und außerdem die
Übergangswiderstände der Steckverbindungen
für die Stromversorgung verkleinert, was ebenfalls als Plus eines
geringeren
Spannungsabfall für die Servos beinhaltet.
SB1b = die wesentlichen Änderungen nach der Umstellung auf 2,4 GHz im Oktober 2009.
Kanaländerung der Flächenservos: QR-links = K1, QR-rechts = K7,
Diese auf dem Baubrett angebrachten Komponenten wie Servos, Akkus u. s. w., habe ich im Verdrahtungsplan SB1 strichpunktiert und gelb hinterlegt kenntlich dargestellt.
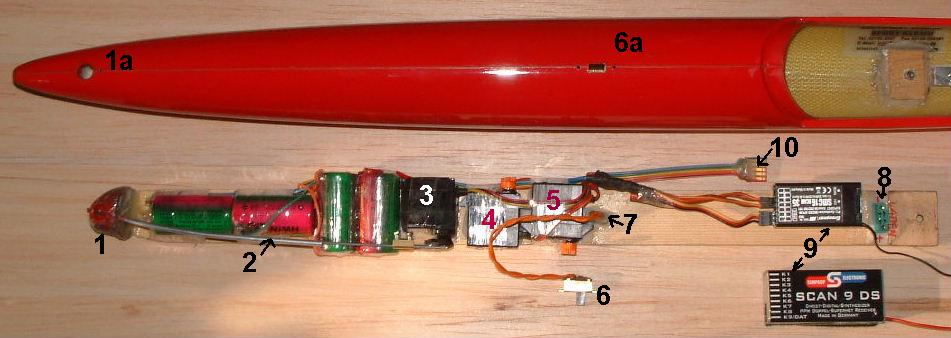
2 = Führungsrohr für den 1,5mm Stahldraht der Schleppkupplung.
3 = Servo für die Schleppkupplung. Befestigt mit doppelseitigem Klebeband und Tesabandage.
4 und 5 = Servos für das V-Leitwerk. Befestigt mit doppelseitigem Klebeband und Tesabandage.
6 = zweipoliger Ausschalter, der in den Ausschnitt 6a eingebaut wird, (Schieber auf Rumpfhöhe gekürzt) siehe SB 1, Bild1 und Bild 2
7 = Steckverbindung zur Trennung des Baubrettes.siehe SB 1 und
 Bild 2
Bild 28 = Ladebuchse (siehe SB 1).
9 = Scan - Empfänger.
10 = 5-polige Buchse zur gleichmäßiges Entladen und Regenerieren nach einem auseinandertriften der NiMH-Zellen bei längerer Lagerung (Nichtgebrauch). Siehe auch hier!
Nachtrag des Batteriewechsels auf 2P 4S ENELOOP-Zellen
und letzter Stand der Verdrahtung. (im Mai 2010 Hg)
.
 SB 1c
SB 1cZusätzlich ist das Ladekabel und die Steckerbelegung für die 6-Klappenversion im Schaltplan mit eingebracht.
Auf die Kanalbelegung ist unbedingt bei einer Kombination mit einem Graupnersender und Futabeempfänger zu achten!
hier die Fertigung der Akkupack, 2 Parallelpacks ENELOOP, 4 Zellen in Reihe



Xo1 als erstes habe ich alle Polkappen verzinnt, dann jeweils 2 Zellen inline verlötet.
Zur besseren und schnellen Inlinelötung verwende ich einen 150W-Kolben.
Xo2 hier sind für zwei Akkupacks 4P 4S die jeweils 2 inline verlöteten Zellen zu sehen, oben auf dem Holzprisma 2 Zellen zum verlöten.
Xo3 2 fertige Akkupacks. Der obere mit Anschlußlitze und eingescheumpft. Der untere noch verlötbar.
Verwendet habe ich bei den Flächenservos (Quer + Klappe) die beiliegenden ALU-Stellhebel, die allerdings 2mm Lagerlöcher besitzen. So habe ich 3mm Gabelköpfe mit ihren obligatorischen 1,55 mm Lagerzapfen präparieren müssen. Diese habe ich mit 2mm Messingrohr aufgedickt, welches ich auf 1,5mm aufgebohrt habe und mit LOCTITE aufgepresst habe. Die Bohrung am Gabelkopf aufgebohrt auf 2,1 mm, ist ebenfalls leichtgängig und spielfrei. Bedingt durch den größeren Durchmesser von 2,1mm, zusätzlich unterliegt die Lagerung nun einer geringeren Abnutzung und behält weitaus länger ihr geringes Lagerspiel bei. Die Alustellhebel müssen mit der Befestigungsschraube sehr fest angezogen werden, um ein Spiel durch die ständigen extremen Belastungen zu vermeiden. An den Zackenkranzverbindungen habe ich zur Sicherheit mit einem kleinen Schraubendreher etwas Schraubensicherung getan (Vorsicht, bei zuviel kann etwas ins K.-Lager geraten). Sollte der Hebel einmal gelöst werden, lässt sich das ganz einfach durch etwas Wärmezufuhr mit z. B. einem Lötkolben machen. Aber auch hier Vorsicht, zuviel ist nicht gut, denn dann kann der Kunststoff des Servogehäuses in Mitleidenschaft gezogen werden.SB 1b
SB 1b = die wesentlichen Änderungen nach der Umstellung auf 2,4 GHz im Oktober 2009
 Bild
3
Bild
3Bild 4 Das aufgebohrte Messingrohr wird mit (wenn vorhanden) etwas LOCTITE, sonst Sekundenkleber aufgepresst. Obwohl die Pressung schon ausreichen kann, sind die Bohrungen exakt gemacht.
Mit einem Messer werden zum besseren Abbrechen rundum Einkerbungen geschnitten und der Bruch anschließend mit einer Feile bearbeitet. Auch kann man die Abtrennung mit einem kleinen Trennschleifer oder Säge machen. Die Abtrennung sollte zur besseren Handhabung nich bor dem Aufpressen geschehen.
 Bild 4
Bild 4::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
b
Durch die relativ hohen Stellkräfte der IQ-200MG besteht eine gute Rückstellung und Neutralisierung der Ruder. Zu dem haben sie einen weit aus geringeren Stromverbrauch als ein Digitalservos, die immer noch relativ teurer sind, aber in der Mechanik bestimmt nicht besser.
Die Gewichte des fertig zusammengebauten und ausgerüsteten Modells
.
Rumpf mit Leitwerken = 1400g (Bleibalast in Nase = 252g, Leitwerke 2 x 68g = 136g Rumpflänge = 1704mm = 30mm gekürzter Leitwerksträger)
Fläche Mittelteil = 1260g
Fläche links = 769g
Fläche rechts = 758g
---------------------------------------
Gesamtgewicht = 4187g
Die Gewichte des 10 Jahre alten Modells (ja so lange kann man ein Modell, wenn die Festigkeit es erlaubt viele hundert Flüge auch am Hang mit div. Außenlandungen machen)
Rumpf mit Leitwerken = 1195g (Bleibalast in Nase etwa 110g, Leitwerke 2 x 56g = 112g, Originalrumpflänge = 1734mm) siehe sport-klemm.Bauanleitungen
Fläche Mittelteil = 1170g
Fläche links = 580g
Fläche rechts = 585g
---------------------------------------
Gesamtgewicht = 3530g
Das Mehrgewicht ist auf Grund der noch größeren Belastbarkeit des Modells (lt. Sport Klemm) eingebracht worden, vergrößert nochmals die Dynamik und Haltbarkeit des Modells.
Im Juli/August 2008, Hg
Heute, am 22. 08. 2008
habe ich die ersten Flüge mit dem neuen FS-4000 am Südhang (Weltenseglerhang) der Wasserkuppe absolviert
und war positiv überrascht über die Leistung und das Flugverhalten des Modells am Hang, trotz geringen Aufwindes.
Einige der Leichtwindsegler hatten ihre Schwierigkeiten und nutzten fast ausschließlich die Hangkante.
Wogegen man der FS-4000 durch seine große Streckung weiträumig den Hang bis zum Zuckerfeld und Kleine Eube ausfliegen konnte.
Vergleichsweise zu meinen etwa 650g leichteren alten FS-4000 war kaum ein Leistungsunterschied außer einer
wie von Volker Klemm schon mir gesagten größeren Dynamik feststellbar.
Klar, bei nichts geht nichts und ein Modell mit einer geringeren Flächenbelastung hat dann auch ein geringeres Sinken.
Es lässt sich trotz des Gewichtes relativ langsam landen und bei etwas stärkeren Gegenwind wie einen Fahrstuhl auf den Punkt setzen.
Was aber noch meinerseits einiger Übungen bedarf.
Die Einstellung habe ich, bis auf minimale Trimmwerte, den Einstellwerten von Sport Klemm übernommen.
Der FS-4000 ist und bleibt eines meiner besten Flugmodelle am Hang!
Für erfolgreiche Wettbewerbe allerdings ist die schwere Ausführung (über 4,2Kg) meiner Meinung nach bei geringen oder gar keinen Aufwinden
einem F3B-, F3J- Modell unterlegen, dann sind kaum die Zeiten eines F3B-Modells oder Flooters (F3J´lers) erreichbar.
_______________________________________________
_________________________________________________________________________
_______________________________________________
Einbau, Änderungen und Ergänzungen beim Elektrorumpf zur Seglerversion imSB 1
 SB 2
SB 2 SB2b
SB2bSB2b = die wesentlichen Änderungen nach der Umstellung auf 2,4 GHz im Oktober 2009.
Kanaländerung der Flächenservos: QR-links = K1, QR-rechts = K7,
Dieser ist mit einem ausreichenden Drehmoment, langsam laufend und preiswert erhältlich. Auch fällt bei einem, diesem Direktantrieb ein lästiger Ausbau für die von Zeit zu Zeit anfallenden Getriebeschmierungen weg. Außerdem entfällt ebenfalls der Verschleiß des Getriebes und vor allem das mitunter nicht angenehme Geräusche des Getriebes.
So habe ich mich für einen der 400er-Serie, über 800W-Hackermotor entschlossen. Dieser hat allerdings einen Durchmesser von 40mm, sodass ich den Rumpf vorne um 57mm gekürzt habe (was problemlos und einfach ging), um diesen passend ein zu bauen. So konnte ich einen 50er Spinner passend in der Farbe verwenden. Wie in der Seglerversion, habe ich den Rumpf ebenfalls hinten um 45mm gekürzt. Die Antriebs- und Steuer- Komponenten konnten gut im vorderen Rumpfbereich für den passenden Schwerpunkt platziert werden. Ein 60 A Motorsteller mit einem 4S 3600mAh C30 KOKAM-LIPO-Akku einbauen. Eine AERONAUT-Klappluftschraube 15 x 10 sorgt für einen guten Steigflug.
Die Spannung des BEC liegt parallel zur Spannung des 4-zelligen 3300 Akkupack und wird mit etwa 5,2V gepuffert. Ist derAkku voll geladen, übernimmt er bis zu den 5,2 V allein die Versorgung. Bei einer größeren Belastung der Servos oder einer längeren Entladung, teilt sich der Strom u. s. w.
Bisher konnte ich bei all meinen verwendeten Motorstellern mit Pufferakku keinerlei Probleme im Bezug eines Aufschwingen oder Aussteigen des BEC feststellen. Auch nicht messen.
Meine Vermutungen gehen dahin, dass einige Experten im oder gar über dem Grenzbereich ihre negativen Erfahrungen gemacht haben und diese dann als Warnung als allgemeines Wissen verbreiten.
 Zur exakten Abtrennung für
einen habe ich
ein ISO-Band angebracht, an dessen Kante dann die Trennung.
Zur exakten Abtrennung für
einen habe ich
ein ISO-Band angebracht, an dessen Kante dann die Trennung.Daneben der als Turbospinner umgebaute 50mm - AERONAUT-Spinner . Baubeschreibung dazu hier!
 Hier der
Motorspant,
den ich aus 2 aufeinandergeklebten 1,5mm Leiterplatten hergestellt
und mit 200g/m² Glasgewebe an der
Hier der
Motorspant,
den ich aus 2 aufeinandergeklebten 1,5mm Leiterplatten hergestellt
und mit 200g/m² Glasgewebe an der Rumpfwand (vorne u. hinten) verstäkt und mit Baumwollflocken verdickt, eingeharzt habe. Selbstverständlich wie üblich, wurde die Rumpfwand vor dem Einkleben angeschliffen.
So ergibt die Verkürzung der Rumpflänge im vorderen Bereich gleichzeitig auch mit allen weiteren Einbaukomponenten der passenden Schwerpunkt.
 Vor der Einpassung.
Vor der Einpassung. Um eine unnötige Tiefenzumischung beim Motorlauf zu vermeiden, habe ich einen Motorsturz von etwas über 1° eingebaut, mehr ging leider durch die Enge des Rumpfes und der Größe des Motors mit den Anschlussleitungen nicht. In der Praxis stellte sich heraus, dass dieser Sturtz ausreichen ist.
 Hier ein kleiner Trick.
Hier ein kleiner Trick.Zur Erleichterung für den Ein- und Ausbau des Motors, habe ich eine M3 Gewindestange verwendet, die ich durch ein Befestigungsloch gesteckt und am Motor angeschraubt habe. Damit lässt sich der Motor gezielt an die entsprechenden Bohrungen heranziehen und anschrauben.
 .
.
Den Antriebsakku habe ich mit einem Klettband befestigt.

Hier die eingebaute Antriebseinheit mit der Einheit der V-Leitwerksservos und Empfänger ( 35-MHz - Version )
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::


Die über den Daumen für einen E-Segler in der Praxis errechnete Leistung mit 90 ... 100 W/Kg, habe ich für die Auswahl vorgegeben und liege mit meinen gemessenen 35,2 A und etwa 14 V bei knapp 500 W, was bei 4,5 Kg mehr als ausreichend in diesem Bereich.
Die Messungen machte ich nach etwa 1,5 Minuten Laufzeit der vollen LIPOS 4S 4000, 30C, wo der gemessene Strom bei 35,2 A lag und die Drehzahl bei 6280 U/min mit einem Graupner CAM FOLDING PROP 14 x 9,5.
So waren und sind auch die Flüge, dass die 4,5 KG zügig nach oben gehen. Auch der Start mit laufendem Motor ist völlig problemlos. Das Modell zieht dabei gut aus der Hand und erfordert kaum ein Nachschieben.
Die theoretische Motorlaufzeit müsste etwa 7 Minuten ergeben. Da die Spannung sich weiter bis zur Abschaltzeit verringert, wird eine genauere Laufzeit noch über die Uhr ermittelt.
Diese ergab dann allerdings nur eine Motorlaufzeit von etwas über 5,5 Minuten. Ich rechne diese Reduzierung hautsächlich den Akkuzellen zu, die bei einer hohen Strombelastung über ihren inneren Widerstand entsteht. Es kann sein, dass eine halbe Minute noch bis zur Abschaltung des Motorstellers drin ist, die dann allerdings eine unnötige Quälerei des Akku´s und ein Hängen statt Steigen des Modells nichts bringt. Besser ist ein Akkuwechsel oder eine Ladung der leeren Zellen, die dieses mit einer längeren Lebenszeit belohnen.
Die Drehzahl nimmt merkbar bei etwas über 4 Minuten ab, wo ich auch die Senderstoppuhr auf 4 Minuten, mit einer Minute warnender Zeitangabe eingestellt habe. Also beträgt die effektive Laufzeit bei 5 Minuten. So kann ich immer noch sicher, bei einem Absaufer aus einem Tal zur Startstelle zurück kommen und die LIPOs werden nicht bis zur Abschaltung unter 3 V/Z gequält.
Ich kann mich nur wiederholen, die Flüge mit dem FS-4000, ob Segler- oder E-Seglerversion, mit seiner relativ großen Dynamik, ist immer wieder ein Erlebnis und Das Modell hat eine mehrfache Lebensdauer im Vergleich eines herkömmlichen Hi Tech Modells und das nicht nur im rauhen Hangflugbetrieb.
=====================================================================================
Nachtrag im März 2015
 glatter
Bruch durch die
Einkerbung für einen Sicherungsklemmring,
glatter
Bruch durch die
Einkerbung für einen Sicherungsklemmring,So hatte ich an zwei Hacker A40 14S einen Wellenbruch. Die Welle war/ist für einen Sicherungsring 0.5mm eingestochen und brach immer an der glasharten, gleichen Stelle bei einem etwas härteren Datsch ab. So kam es zu den Wellenbrüchen !!!
Aeolian C4250 KV600 technische Daten:
Drehzahl: 600 / Volt
Betriebsstrom: 50A max 60A
Betriebsspannung: 11,1 - 24,8V
Wirkungsgrad max: 98%
Leerlaufstrom: 2,5A
Leistung: 1055W
Ri: 42,2mΩ
Gewicht: 210g
Durchmesser / Länge: 42 x 50mm
Wellendurchmesser: 5mm
_____________________________________________________________________________________
Habe auf Empfehlung eines Modellfliegers mir diesen D-Power Motor für meinen alten Chadow und die FS-4000 als Direktantrieb zugelegt.
Der Herstelller dieser Motore hat wie ich festgestellt habe dieses Problem wie folgt gelöst:

und der Einstich für den Sicherungsring nur bis auf 5,7mm, der ausreichend für den Sicherungsring ist, zumal die Latte zieht.
Beim Hackermotor hat die Welle durchgehend 5mm und durch den Einstich um einiges weniger als 5mm etwa nur 4mm!!!